Build cross-platform and optimized drone applications.
BeeCluster drone orchestration platform.
![[object Object]](/img/feature1.svg)
Dynamic Tasking
BeeCluster embraces dynamic task graph (DTG) as its core programming model, allowing your application to react to the environment by creating new tasks or canceling existing tasks dynamically.
![[object Object]](/img/feature2.svg)
Flexible Virtual Drones
BeeCluster provides a set of versatile abstractions mapping your virtual drones to physical drones. You can even define a virtual drone with infinite flying time in BeeCluster!
![[object Object]](/img/feature3.svg)
Predictive Optimization
BeeCluster forecasts your application's future behavior and optimizes the execution of your application transparently.
BeeCluster simplfies the development of drone applications.
The orchestration platform manages a fleet of drones and provides virtual drone service to the application developers. The application developers only need to focus on the high level application logic, while the underlaying orchestration platform takes care of the optimization and low-level drone controls. (learn more)

BeeCluster's programming interface is simple and flexible.
BeeCluster API is powered by dynamic task graph (DTG). Developers can use the API in many coding structures, and compose basic structures to express more complicated application logics. The runtime system can naturally capture the task dependency and parallelism, and use them to schedule drones efficiently. (learn more)

Programming Examples
For developers, we show a few coding examples here. You can try out these examples in our built-in simulator.
Create BeeCluster Sessions
Box Pattern
Virtual Drone Binding
Continuous Operation
Massive Parallel Tasks
Failure Handling
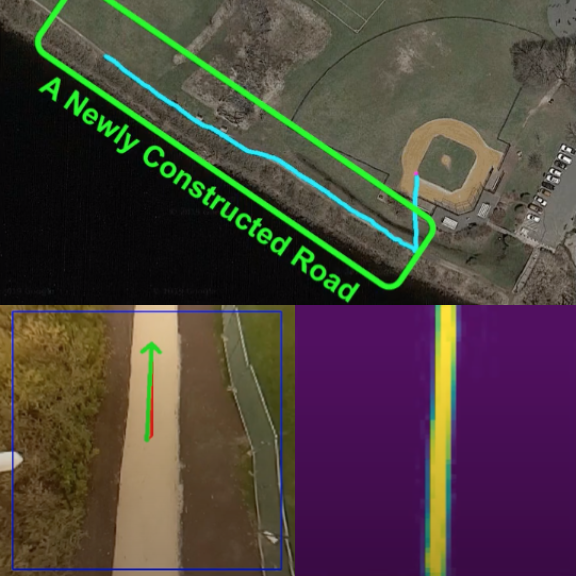
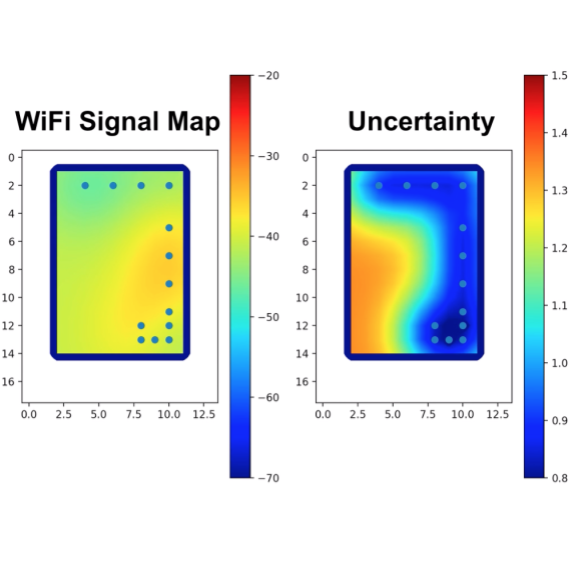
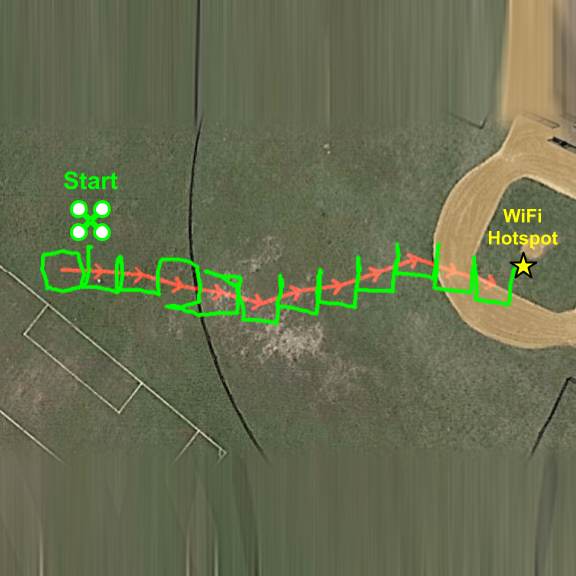
Real-World Case Studies
BeeCluster Presentation at MobiSys 2020 (Watch here ↓ or on youtube).
Cite This Work
The original research paper of this work was published at MobiSys 2020. Please use the following BibTex to cite this paper.